Diese Diskussionsseite wurde aufgeräumt.
Einträge ohne direkten Diskussionsbezug oder nicht unterschriebene Einträge wurden ohne Archivierung entfernt, Verbleibendes ins Archiv verschoben, sofern die Diskussion als abgeschlossen erachtet wurde. Bitte nicht wieder zurückverschieben, sondern das Thema neu starten. Die Archivierung erfolgt von Zeit zu Zeit, um die Übersicht wiederherzustellen.
Dies betrifft nur Abschnitte bis zum 8.3.2008. Sie sind hier auffindbar: [1].
Letzter Kommentar: vor 16 Jahren12 Kommentare8 Personen sind an der Diskussion beteiligt
Die Epipolargeometrie ist ein Begriff aus der projektiven Geometrie, der Photogrammetrie und dem maschinellen Sehen und beschreibt die projektive Beziehung zwischen korrespondierenden Bildpunkten in zwei Kamerabildern. Korrespondierend sind zwei Punkte dann, wenn sie die Abbildungen des selben Objektpunktes sind. Die Beziehung besagt, dass sich ein Punkt in einem Bild jeweils nur auf einer bestimmten, durch den korrespondierenden Punkt im anderen Bild festgelegten Linie befinden kann.
Aller guten Dinge sind (hoffentlich) drei. Der Artikel war bereits zweimal hier und scheiterte. Es lag wohl einfach daran, dass er noch zu unverständlich war. Ich habe ihn jetzt z. T. stark umgebaut. Gleichzeitig hat Norro die Bilder neu gemacht und mir viel im Review und im Artikel geholfen. Vielen, vielen Dank. In der Hoffnung, dass er jetzt reif ist, verbleibe ich mit dem Hinweis, dass ich alle Kritikpunkte hoffentlich zeitnah beseitigen kann. Curtis NewtonKommentare?
Pro Ich habe den Artikel schon im Review beobachtet, die Materie ist ausführlich und in allen wesentlichen Bereichen behandelt. Er ist interessant zu lesen, gut bebildert, wenn auch streckenweise ziemlich technisch/mathematisch. Für mich allemal lesenswert. --norro21:26, 16. Jan. 2008 (CET)Beantworten
Ohne abzustimmen möchte ich erwähnen, dass ich (Leser OMA) den Artikel schwer verständlich fand. Es werden zu viele mir unbekannte Wörter unvermittelt verwendet ("projektiv"). Ich musste die Einleitung mehrmals lesen, bis ich verstand (?), worum es geht.--Ziko13:58, 17. Jan. 2008 (CET)Beantworten
Hmm, schade, gerade an der Einleitung habe ich lange gesessen. (Das Wort projektiv war an der Stelle allerdings wirklich unpassend, das habe ich rausgenommen). Man muss sich aber in die Thematik auch erstmal kurz reindenken. Ich weiß nicht, wie ich das in der Einleitung noch klarer formulieren kann. Ich habe mir gerade mal diesen excellenten Artikel angeschaut. Ist da die Einleitung sofort klar (ich kannte das Verfahren, deswegen kann ich das schlecht beurteilen)? Curtis NewtonKommentare?14:29, 17. Jan. 2008 (CET)Beantworten
Hatte heute Laundromat-Day, da hatte ich Zeit, den Artikel mal zu lesen. Ich hab ja noch nen ganzen Haufen Anmerkungen: i) Der Artikel definiert sein Lemma immer noch nicht: Was ist eine Epipolargeometrie? Eine Abbildung, die korrespondierende Bildpunkte aufeinander abbildet? Entsprechend ist mir auch unklar, welche Rolle das Konzept nun in der 3D-Bildanalyse spielt. ii) Die Modellierung sollte genauer erklärt werden, insbesondere dass ein Bild als zweidimensionale Punktmenge betrachtet wird. iii) Grundlagen und Begriffe "Abbildung des Projektionszentrums der einen Kamera im Bild der anderen". Abbildung unter was? iv) Das mit der projektiven Geometrie verstehe ich nicht, es scheint mir so auch falsch zu sein, laut Homogene Koordinaten geht es nicht Rotationen, sondern um affine Transformationen, die sich in der Tat normalerweise nicht mit einer linearen Abbildung darstellen lassen (im Gegensatz zu Rotationen). v) Geometrische Herleitung: Die Matrix H von der Homographie fällt vom Himmel, da ist alles unklar. Die Notation ist mir völlig unbekannt, im Artikel wird sie nicht erklärt. vi) Eigenschaften der Fundamentalmatrix: Was das jetzt konkret bedeutet, dass sie singulär ist, ist mir nicht so klar geworden, kann man nicht anschaulich erklären, warum der Zusammenhang nicht 1 zu 1 ist? Warum ist der dritte Vektor eine Linearkombination der beiden anderen? Einfach weils singulär ist oder steckt da irgendeine Überlegung hinter? vii) 7-Punkt-Algorithmus: Die Herleitung verstehe ich leider gar nicht: Wenn es nur 7 Freiheitsgrade gibt, dann reichen wohl 7 Gleichungen. Wozu die dortigen Überlegungen? Warum liefert die Singulärwertzerlegung Lösungen? Warum "die beiden", wenn dann da eine ganze Schar da steht? viii) 8-Punkt-Algorithmus: Den zweiten Absatz verstehe ich nicht. ix) Vorgehen in der Praxis: Der RANSAC-Algorithmus fällt komplett vom Himmel, es wird auch nicht erklärt, was er tut und was er mit der Epipolargeometrie zu tun hat. x) Wenn das noch behoben werden kann, Pro von mir. Viele Grüße --P. Birken07:10, 18. Jan. 2008 (CET)Beantworten
Hallo P.Birken,
da musste ich doch erstmal nachschauen, was ein Laundromat ist. Sowas aber auch. Vielen Dank erstmal. Ich gehe mal die Punkte duch:
zu i) Ich habe die Einleitung erweitert. Die Epipolargeometrie wird jetzt definiert.
zu ii) Habe ich jetzt im Grundlagenabschnitt hinzugefügt.
zu iii) Habe ich mal umgeschrieben. Der Epipol ist quasi der Bildpunkt des jeweils anderen Projektionszentrums. Abgebildet natürlich durch die jeweilige Kamera des Bildes.
zu iv) Den Abschnitt zur proj. Geometrie habe ich mal umgeschrieben. Ich denke aber, die Erklärung der proj. Geometrie kann ich in diesem Artikel nicht leisten. Ich habe aber 1. proj. Geometrie und homogene Koordinaten verlinkt (wer will, kann sich also mehr informieren) und 2. es so umgeschrieben, dass es in sich stimmig ist.
zu v) Die Notation wird hinter dem Link erklärt. Ich habe es aber auch mal hier mit reingenommen und H vom Himmel auf die Erde geholt. Der Artikel Homographie (Mathematik) fehlt einfach noch. Das will ich an der Stelle nicht unbedingt erklären, weil das dann IMHO zuviel ist.
zu vi) Trage ich nach.
zu vii) Trage ich nach.
zu viii) Umgeschrieben. Das mit der Normalisierung habe ich mal rausgenommen, weil dafür tieferes Verständnis der SVD notwendig wäre. Und eigtl. gehören diese Details nicht mehr in den Artikel.
Pro Ich verstehe kein Wort davon, aber es sieht sehr professionell gemacht aus. Den größten Teil hab ich auf Schreibfehler durchgesehen. War in Ordnung. Kann man Begriffe wie "detektieren" eindeutschen? (Abschnitt Automatische Berechnung). "Lesenswert" ist irgendwie der falsche Begriff, aber wir haben ja keinen besseren. :-) -- Andreas Werle23:08, 18. Jan. 2008 (CET)Beantworten
Leider immer noch Kontra. Ich habe vor über zehn Jahren schon Vorlesungen zu dem Thema gehört, hatte aber Schwierigkeiten, mich anhand des Artikels wieder einzuarbeiten. Schon die Einleitung gefällt mir nicht. "Innere Geometrie" wird nicht erklärt. Werden nicht innere und äußere Orientierung bei der Epipolargeometrie verbunden? Warum sind korrespondierende Punkt so wichtig? Welche Rolle spielt die äußere Orientierung (wird in ganzen Artikel nicht genannt)? Ich weiß, daß es schwierig ist, dieses Thema allgemeinverständlich darzustellen. Ich habe mich mal an einer neuen Einleitung versucht und auf die Diskussionsseite gestellt. Im weiteren Teil hat insbesondere der mathematische Teil Lücken und ist schwer verständlich. Ich will gern bei einer Verbesserung helfen, aber für diese Kandidatur ist es wohl zu spät. 80.146.115.10214:34, 20. Jan. 2008 (CET)Beantworten
Deine Einleitung habe ich zum größten Teil übernommen. Sie ist jetzt IMHO klarer. Innere Geometrie heißt einfach, dass die Epipolargeometrie nur mit den beiden Bildern zusammen hängt, also unabhängig von der Szene ist. In der Photogrammetrie gibt es noch die sog. relative und die äußere Orientierung, was aber was anderes ist (deswegen kommt die äußere Orientierung auch nicht vor, weil sie so erstmal nicht mit der Epipolargeometrie zu tun hat). Der math. Teil ist einfach etwas schwieriger. Ich denke, man kann von dem Artikel aber nicht verlangen, dass er die Lösung linearer Gleichungssysteme erläutert. Mein Ziel war, dem Laien einen groben Überblick (und genug Links, damit er bei Interesse nachlsesen kann) und dem Profi soviel Informationen zu geben, dass er die Berechnung nachvollziehen kann. Und das ist mir, so denke ich, gelungen. Ich würde mich aber freuen, wenn Du mithelfen würdet. Zur Not komme ich halt ein viertes mal wieder hierher ;.) Curtis NewtonKommentare?15:25, 20. Jan. 2008 (CET)Beantworten
Letzter Kommentar: vor 16 Jahren11 Kommentare9 Personen sind an der Diskussion beteiligt
Diese Kandidatur läuft vom 16. Februar bis zum 7. März
Nehmen zwei Kameras ein Objekt oder eine Szene von verschiedenen Positionen fotografisch auf, stellt die Epipolargeometrie (selten auch Kernstrahlgeometrie) die geometrische Beziehung zwischen den beiden Kamerabildern dar. Mit ihrer Hilfe lässt sich die Abhängigkeit zwischen korrespondierenden Bildpunkten — also den Punkten, die ein einzelner Objektpunkt in den beiden Kamerabildern erzeugt — beschreiben. Die Grundlagen der Epipolargeometrie wurden bereits 1883 von Guido Hauck und 1908 von Horst von Sanden untersucht, sie gelangte aber erst mit der maschinellen Auswertung digitaler Bilder zu größerer Bedeutung.
Der Artikel wurde vor knapp einem Monat mit Ach und Krach lesenswert gewählt. Seitdem haben Benutzer:Norro, eine sehr nette und kompetente IP sowie ich den Artikel stark überarbeitet und erweitert. Die Bebilderung hat um einiges an Qualität zugenommen. Wir denken, er ist jetzt bereit, hier vorgestellt zu werden. Als einer der Hauptautoren bin ich natürlich nicht Neutral, stimme aber selbstverständlich nicht mit ab. Curtis Newton↯10:17, 16. Feb. 2008 (CET)Beantworten
Nach Einarbeitung der genannten Punkte jetzt Pro. Neutral mit Potenzial zum knappen Pro. Gute Darstellung eines für den typischen Oma-Test sehr undankbaren Themas. Mir fallen allerdings noch mehrere Kleinigkeiten ins Auge:
Die Intro benötigt m. E. noch etwas Nachschliff. Der Lemma-Begriff sollte im ersten Satz früher kommen; etwa (Grobentwurf): „Die Epipolargeometrie (selten auch Kernstrahlgeometrie) ist ein mathematisches Modell aus der Geometrie, das die geometrischen Beziehungen zwischen verschiedenen Kamerabildern des gleichen Motivs beschreibt. Nehmen zwei Kameras ...“ Auch sollte der Begriff „maschinelles Sehen“ als eine zentrale Hauptanwendung bereits im Intro erwähnt werden.
„Die Grundlagen der Epipolargeometrie wurden bereits 1883 von Guido Hauck und 1908 von Horst von Sanden untersucht, sie gelangte aber erst mit der maschinellen Auswertung digitaler Bilder zu größerer Bedeutung.“ Dieser Satz wird verständlicher nach Umstellung: „Obwohl ihre Grundlagen bereits 1883 von Guido Hauck und 1908 von Horst von Sanden untersucht wurden , gelangte die Epipolargeometrie erst mit der maschinellen Auswertung digitaler Bilder zu größerer Bedeutung.“
„Ist ein Bildpunkt in einem Bild gegeben und wird der korrespondierende Punkt im anderen Bild gesucht, reduziert sich bei Kenntnis der Epipolargeometrie der Suchbereich vom gesamten Bild auf eine einzelne Linie.“ Dieser Satz steigt für den Zweck der Intro m. E. bereits zu tief ins Thema ein und gehört in den Artikel-Textkörper verschoben.
Kapitel Prinzip: „In nebenstehender Grafik werden die geometrischen Beziehungen verdeutlicht.“ Das ist zu uneindeutig. Der Leser sieht da 3 Grafiken, eine links, zwei rechts.
„Als Beispiel sei die Vermessung von Werkstücken zur Qualitätsprüfung, die Gebäudeaufnahme bei der Architekturphotogrammetrie oder die Luftbildphotogrammetrie zur Erstellung von Kartenwerken genannt.“ Die Aussage ist mir zu unverbindlich. Besser: „Wichtige Einsatzgebiete sind ...“
Zum erwähnten „DARPA Grand Challenge“ sollte der Leser etwas besser geführt werden. Wenigstens die zwei verhungerten Worte „unbemannte Landfahrzeuge“ sollten hier spendiert werden.
„Danach beschäftigen sich viele Wissenschaftler bis heute mit der Epipolargeometrie. Bekannte Namen sind unter anderen Richard Harltey, Andrew Zisserman, Berthold K. P. Horn und Steve J. Maybank.“ Besser: „Seitdem beschäftigen sich viele Wissenschaftler mit der Epipolargeometrie, darunter Richard Harltey, Andrew Zisserman, Berthold K. P. Horn und Steve J. Maybank.“ Es müsste wohl „Hartley“ statt „Harltey“ heißen? Wenn diese Wissenschaftler so bekannte Namen sind, sollten sie auch (blau oder rot, ist dann egal) verlinkt werden.
Typo: „Das Kreuzprodukt mit einen Vektor“ -> „Das Kreuzprodukt mit einem Vektor“
Kapitel Berechnung: Der Hinweis „wie bei der Herleitung gezeigt“ überfordert den Leser. Konkret das vorherige Kapitel oder gezielte Unterkapitel daraus als Ort des referenzierten Herleitungsteiles nennen.
„In der Praxis existieren zwei Verfahren zur Berechnung der Fundamentalmatrix“ -> „In der Praxis finden zwei Verfahren zur Berechnung der Fundamentalmatrix Verwendung“
7-Punkt-Algorithmus: „Diese kubische Gleichung hat mindestens eine und höchstens drei Lösungen“ -> „Diese kubische Gleichung hat mindestens eine und höchstens drei reelle Lösungen“
7-Punkt-Algorithmus, 8-Punkt-Algorithmus, Automatische Berechnung: Warum stehen diese 3 Methoden auf der gleichen Gliederungsstufe untereinander? Der Leser fragt sich: Sind die ersten beiden nicht auch Verfahren zur automatischen Berechnung?
„Zu diesem Zweck wird der so genannten RANSAC-Algorithmus eingesetzt“: Dies ist m. E. nicht zwingend. Jedes Verfahren zur Separierung und Eliminierung von Ausreißern (evtl. auch ein „handgestricktes“) könnte hier zum Einsatz kommen.
„Für mehr als vier Ansichten wurden jedoch keine mathematischen Beziehungen untersucht, da es praktisch schwierig ist, ein Objekt von fünf oder mehr Standpunkten aus so aufzunehmen, dass sich alle Bilder signifikant unterscheiden.“ Glaube ich so nicht; Beispiel: Dichtgedrängte Menschenmassen auf einem Platz. Einzelne Gesichter sind so verdeckt, dass sie nur aus einem sehr schmalen Winkelbereich sichtbar sind. M. E. besser: „Da die Komplexität der Modellierung und Berechnung wesentlich höher ist und in den meisten Anwendungen ab der fünften Kamera der zusätzliche Informationsgewinn nur noch gering/marginal ist.“
Literatur: „Richard Hartley and Andrew Zisserman“: „and“ nach „und“ übersetzen; „ISBN ISBN 0-521-54051-8“: ISBN-Dopplung wegnehmen (jeweils mehrmals im Lit-Verzeichnis).
Pro Ich habe den Artikel schon während der Lesenswert-Kandidatur und des Reviews beobachtet und durch Mitarbeit begleitet. Ich bin kein Epipolargeometrie-Fachmann, habe mich aber von berufswegen einige Zeit mit dem Thema auseinandergesetzt. Soweit ich es beurteilen kann, ist der Artikel fachlich korrekt und deckt alle wesentlichen Bereiche der Thematik ab. Er ist für mich überdies interessant und verständlich zu lesen. --norro21:19, 24. Feb. 2008 (CET)Beantworten
Wohlwollendes Laien-Pro. Ich habe fachlich bei weitem nicht alles verstanden, aber solche Grenzen sind wohl allzu natürlich. Das, was ich verstanden habe, fand ich sprachlich gelungen. Die Einleitung ist für einen fachlich so speziellen Artikel fast ein Musterbeispiel an allgemeinverständlicher grundlegender Erklärung eines solchen Begriffes. Sie beweist, dass sich eigentlich zu jedem noch so abgefahrenen Thema zumindestens eine kurze Erklärung schreiben lässt, die jeder Mensch mit Allgemeinbildung und durchschnittlicher Intelligenz versteht. Gelungen finde ich auch das Bild in der Einleitung samt der zugehörigen Bildunterschrift. -- Uwe21:33, 24. Feb. 2008 (CET)Beantworten
Pro Der Artikel hat durch die Ueberarbeitungen nochmal enorm gewonnen. Schoen, mal wieder einen exzellenten Mathematikartikel zu sehen! --P. Birken12:32, 27. Feb. 2008 (CET)Beantworten
Pro: Habe über den Artikel auch während der KLA schon mal drübergeschaut und verstehe jetzt viel mehr, ohne mich in mir unbekannte mathematische Konzepte einarbeiten zu müssen. Toll, wie viel man jetzt als auch mit Schulmathematikkenntnissen mitnehmen kann. Folgende Frage hätte ich noch: Muss die Position der Kameras relativ zueinander nicht grundsätzlich bekannt sein? Der folgende Satz bringt mich da ins zweifeln: Mit Hilfe der Epipolargeometrie kann eine einfache Beziehung zwischen korrespondierenden Punkten ohne Kenntnis der Kamerapositionen hergestellt werden. Sie hängt nur von den Parametern der Kameras ab und ist damit unabhängig von der Struktur der aufgenommenen Szene. --Cactus2610:07, 7. Mär. 2008 (CET)Beantworten
Nein, die Position muss nicht bekannt sein. Die Epipolargeometrie ist halt nur von der Lage und Aufbau der Kamera abhängig, aber zu ihrer Beschreibung müssen diese nicht bekannt sein. Ich verstehe aber das Problem und werde mal drüber nachsinnieren, wie ich das besser erklären kann. Danke für den Hinweis! Curtis Newton↯10:32, 7. Mär. 2008 (CET)Beantworten
Ich habe einen Satz zur Erklärung eingefügt. Vielleicht kann man ihn auch mit "Die Epipolargeometrie ist zwar von der Lage und Aufbau der Kamera abhängig" beginnen. Guck es Dir mal an. 80.146.80.8613:13, 7. Mär. 2008 (CET)Beantworten
Pro - ich muss ehrlich sagen, dass ich bevor ich diesen Artikel gelesen habe, nicht gewusst habe um was es sich bei dem Titel handelt. Ich bin für ein Pro, da ich Laie bin und den Artikel für sehr exzellent halte, da die wichtigsten Informationen vorhanden sind. Ein Artikel der sehr ins Detail geht und sehr wissenschaftlich klingt und aufgebaut ist (Pro) Herzi17.
Letzter Kommentar: vor 16 Jahren2 Kommentare2 Personen sind an der Diskussion beteiligt
Zitat: Die Epipolarlinie wird in homogenen Koordinaten durch die Geradengleichung beschrieben, wobei als Kreuzprodukt aus zwei Geradenpunkten berechnet werden kann:
Sollte das nicht sein, mit als einem (beliebigen) Punkt der Geraden?
Der Index bezieht sich in diesem Zusammenhang immer auf das Bild, der Index 2 bedeutet also, daß die Bildkoordinaten im zweiten Bild gemeint sind (nicht der Punkt 2). Wenn man Punkte unterscheiden wollte, müßte man einen weiteren Index hinzufügen. Da in diesem Abschnitt (anders als im Abschnitt Prinzip) nur ein Punkt betrachtet wird, wurde der Punktindex weggelassen. Zugegeben - ich mußte auch erst etwas überlegen. 80.146.79.16611:08, 21. Mai 2008 (CEST)Beantworten
Welche Parameter werden in Bezug auf eine Kamera kalibriert ?
Ich habe mal auf den "kalibriert" Link geklickt und bin auf einen allgemeinen Artikel zum Vorgang des Kalibrierens gestossen. Es passt vielleicht nicht in diesen Artikel, aber es wäre interessant zu wissen welche Parameter man denn bei einer Kamera kalibrieren kann. Bei einigem Nachdenken meine ich vermuten zu dürfen, das es um Abbildungsfehler in dem Sinne geht, das ein Punkt eines aufgenommenen Objekts nicht an der Stelle auf der Abbildungsebene ist wo er nach den Gesetzen der Optik bei einem idealen Objektiv usw. sein sollte.
Letzter Kommentar: vor 15 Jahren1 Kommentar1 Person ist an der Diskussion beteiligt
Ich hoffe, es passt hier hin:
Der Trifokalfall ist nicht für alle Punkte in der Trifokalebene degeneriert, wie es der Artikel suggeriert. Mit der Epipolargeometrie ist da nichts zu machen, das stimmt. Die Trifokalgeometrie ist nur auf der Verbindungslinie von erstem zu zweitem Kamerazentrum degeneriert (aber die bilden echte Kameras sowieso nie ab). Das ist ja gerade der Vorteil der Trifokalgeometrie, dass die "deficiency of the epipolar transfer" nicht auftritt. (nicht signierter Beitrag von85.180.66.138 (Diskussion) 00:23, 18. Dez. 2008)
Letzter Kommentar: vor 14 Jahren5 Kommentare3 Personen sind an der Diskussion beteiligt
Hallo Mitautoren.
Da ich mich zur Zeit wieder etwas mit dem Thema beschäftige ist mir aufgefallen, dass der Artikel in einer Hinsicht nicht ganz vollständig/korrekt ist: Im Falle von Bildern mit großer Verzerrung (wie sie etwas Fischaugen-Objektive oder Omnidirektionale Kameras erzeugen, sind Epipolarlinien keine Geraden, sondern konisch, siehe dazu z. B. dieses Paper (auch schon im Abstract erwähnt).
Die aktuellen Formulierungen dieses Artikel gelten also nur näherungsweise und für den (Normal-) Fall einer großen Brennweite der Kamera. Ich frage mich, wie man das nun am besten einbaut … Als Randnotiz im Artikel, dass die Epipolarlinien nur eine Näherung sind? Oder als eigenen Abschnitt, der Sonderfälle mit kreisrunden Epipolarlinien zeigt und erläutert? (etwa „Epipolargeometrie bei kleiner Brennweite“ o. Ä.) Irgendwelche Ideen?
Find ich gut. Also ein Bilderpaar mit gekrümmten Epipolarlinien, Erklärung, warum das so ist, unter welchen Voraussetzungen man von Epipolarlinien ausgehen darf und Verweis auf weitere Literatur. Ich komme leider an keine Bilder von Fischaugen dran, könnte allenfalls Bilder mit einem omnidirektionalen Spiegellinsenobjektiv machen. Gruß, norrowdw16:02, 27. Mai 2009 (CEST)Beantworten
Letzter Kommentar: vor 13 Jahren2 Kommentare2 Personen sind an der Diskussion beteiligt
Das Bild von Stanley hat in diesem Beitrag nichts zu suchen, da Stanford bei der Grand Challenge 2005 lediglich eine Monokamera eingesetzt hat.
Quelle:
Hendrik Dahlkamp, Adrian Kaehler, David Stavens, Sebastian Thrun, and Gary Bradski: "Self-supervised Monocular Road Detection in Desert Terrain". In G. Sukhatme, S. Schaal, W. Burgard, and D. Fox, editors, Proceedings of the Robotics Science and Systems Conference, Philadelphia, PA, 2006 (nicht signierter Beitrag von84.152.198.125 (Diskussion) 22:53, 12. Dez. 2010 (CET)) Beantworten
Letzter Kommentar: vor 13 Jahren2 Kommentare2 Personen sind an der Diskussion beteiligt
Es wird im Text zwischen Kommentarklammern <!-- --> eine Frage gestellt :
<!-- Ist die Suche nach einer eindeutigen Lösung relevant und in der Literatur beschrieben? Für mehr als 7 Punkte gibt es ja andere Verfahren. -->.
Ist es vernünftig, eine Diskussion auf dieser Art anzufassen ? Ich möchte dem feigen Autor dieser Bemerkung, der sich nicht irgendwie identifiziert, daß er nur weiter lesen sollen hätte, um zu sehen, daß dieser Algorithmus mindestens, um die RANSAC Iteration anzulassen nötig ist. Trassiorf22:18, 4. Feb. 2011 (CET)Beantworten
Dieser "feige Autor" ist eine IP, ohne deren Hilfe der Artikel damals nie excellent geworden wäre. Insofern ist der Vorwurf absolut nicht berechnet. Inhaltlich scheinst Du aber Recht zu haben. Curtis Newton↯07:47, 5. Feb. 2011 (CET)Beantworten
Letzter Kommentar: vor 13 Jahren2 Kommentare2 Personen sind an der Diskussion beteiligt
Auf der Gallerie „Ergebnis der Berechnung“ werden 2 Bilder verglichen:
Korrespondenzen nach RANSAC, mit denen F berechnet wird
Einige Epipolarlinien, berechnet mit F.
Das Problem ist, daß beide Bilder nicht dieselbe sind: eines ist das rechte, das andere das linke (die Perspektiven sind nicht dieselbe). Darum sind die Epipole nicht koinzident: auf dem erste Bild ist das Epipol sehr weit links, ungefähr unendlich weit, und ein bißchen nach unten (die Epipolarlinien sind ungefähr parallel); auf dem zweiten Bild ist das Epipol viel näher, und ungefähr am Horizont: die Epipolarlinien oben fahren von rechts nach links ein wenig aufwärts, unten fahren sie klar nach unten.
Für den Vergleich wäre es viel angenehmer, ein Paar derselben Bild zu zeigen. Ist noch eines zu Verfügung ? Kann ein Author es ändern ? Vielen Dank für die nächste Leser. Trassiorf11:12, 5. Feb. 2011 (CET)Beantworten
Letzter Kommentar: vor 13 Jahren5 Kommentare5 Personen sind an der Diskussion beteiligt
Ich habe diesen exzellenten Artikel gründlich gelesen, da ich ihn ins Französische übersetzt habe.
Ich möchte ihn noch exzellenter machen, mit ein paar Bemerkungen. Die Autoren würden besser selber die zweckmäßigen Korrekturen machen, um ihre Genauigkeit prüfen zu können:
Am Ende des Anfangs der Sektion „2 Anwendungen“ werden folgende Anwendungdomänen zitiert : Qualitätsprüfung, Gebäudeaufnahme, Kartenwerk. Leider wird das maschinelle Sehen, das als Hauptanwendungdomäne in der Einführung gilt, und in der folgenden Subsektion vorgestellt wird, nicht zitiert.
Einführung in die homogenen Koordinaten : Jeder Punkt in der kartesischen Ebene hat eine Injektion in die projektive Ebene, aber nicht umgekehrt : wenn w = 0, ist es unmöglich, kartesische Koordinaten zu finden. Der Punkt liegt dann am Unendlichen. Die projektive Ebene ist grösser als die übliche Ebene. Aber in der Perspektive kommt das sehr praktisch an : es ist möglich, konsistent über Punkte am Unendlichen zu sprechen, die in Perspektive als Fluchtpunkte erscheinen. Darum ist es so nützlich, mit homogenen Koordinaten in der Epipolargeometrie zu arbeiten.
Dieselbe Bemerkung gilt für den Satz nach der Gleichung : x = PX. Es gibt keine Sicherheit, dass w ≠ 0, und das Ergebnis kann wohl am Unendlichen liegen. Das wird sogar der Fall für die Epipole im Sonderfall 1 sein.
7-Punkt-Algorithmus : Die Gleichung für α ist nicht kubisch wenn der α3 Term gleich Null ist, was für Det(F1) - Det(F2) = 0 der Fall ist. Dann kann es passieren, daß es keine Lösung für α gibt, aber für das Problem ist F = F1 - F2die Lösung. Das ist ein anderes Beispiel, daß die projektive Gerade nicht identisch mit der gewöhnlichen Geraden ist: sie hat den zusätzlichen Punkt am Undendlichen.
Ich quetsch mich mal hier zwischen: Es muß doch "det(F1-F2)=0" heißen. Ich hab das korrigiert und etwas ergänzt. Dieser Sonderfall hat aber weniger etwas mit projektiven Geraden zu tun als mit der Tatsache, daß mit der Linearkombination von F1 und F2 dieser eine Fall nicht repräsentiert werden kann. Man könnte das mit der Kombination αF1+βF2 unter der Nebenbedingung α²+β²=1 lösen, was aber wohl zu komplizierteren Gleichungen führt. 93.195.181.3412:58, 10. Mär. 2011 (CET)Beantworten
8-Punkt-Algorithmus : „Im Idealfall hat die Matrix A den Rang 8, in der Praxis ... wegen Messungenauigkeiten nicht der Fall“. Es könnte erwähnt werden, daß falsche Korrespondenzen noch mehr den Rang beinflüssen.
Vor der Korrespondenzanalyse : „die Kamera [wurde] nach der ersten Aufnahme nach rechts geschwenkt“. Es gibt hier eine Umstellung der Bilder. Das 1. Bild ist von der rechten Position genommen, das 2. von links. Das kann man zum Beispiel vom Vergleich zwischen den Gehwegen schließen: auf dem 1. Bild sind sie steiler als auf dem 2. : die 1. Kamera ist näher der Vertikale der Strasse, das ist rechts. Das ist ein relativ kleiner Unterschied. Der Hauptunterschied ist, dass die Kamera ein wenig umgedreht wurde, und darum sind wir nicht im „normalen stereo Fall“, und die Korrespondenzvektoren sind viel größer, als sie in diesem Fall wären.
Vor dem Ergebnis der Berechnung: „In der rechten Darstellung wurden die Epipolarlinien der markanten Punkte eingezeichnet.“ Wie im Bildtext beschrieben ist, wurden nur einige Epipolarlinien eingezeichnet. Sonst hätte man nichts mehr sehen können. Es könnte für den Leser nützlich sein, zu betonen, daß die Bilder aus den zwei Stellen stammen, und darum haben sie nicht denselben Epipol : auf dem linken Bild scheint es am Unendlichen zu sein, ein wenig unten nach links; auf dem rechten ist es ungefähr am Horizont, rechts um ungefähr 4 Bildweiten des Bildzentrums entfernt.
Sonderfall 1: „die Epipole [verschieben sich] ins Unendliche“. Darum sollte man die Punkte am Unendlichen, mit einigen Eigenschaften, mit den homogenen Koordinaten einführen. Sonst ist das für den Leser schwierig.
Es könnte in diesem Sonderfall erwähnt werden, daß das menschliche Sehen immer in diesem Sonderfall ist. Es ist wunderbar, daß es trotz ihrer Beweglichkeit ungefähr unmöglich ist, die Augen in Richtungen zu lenken, die nicht in derselben Ebene als der Trennungvektor der Augen liegen. Sie können nur in solchen Richtungen Korrespondenzen suchen.
Es gibt schwere Fehler in der Figur der Sonderfälle. In Konfiguration 1. sind die grüne Bälle und die Kameras näher als die Orangen. Darum sollte die Parallax größer sein: die Bilder der grünen Bälle sollten weiter voneinander als die Orangen sein. Die Tangenten sollten auch gezeichnet werden, um zu zeigen, daß sie auch durch die Epipole gehen (am Unendlichen).
In Konfiguration 2. man sollte auch den Parallaxeffekt zeigen, aber auch die Tangenten, die alle durch den Epipol gehen sollen !
Eine korrigierte Figur ist auf Commons unter commons:file:Epipolargeometrie4A-fr.svg sichtbar. Es ist auf französisch, aber mit the „svgtranslate tool“ einfach zu übersetzen.
Entsprechende Änderungen gemacht. Bitte Sprachenfehler korrigieren ! Aber wie Curtis Newton sagt : Das macht doch nichts. Meines Erachtens kannst Du gut deutsch. Außerdem lese ich sowieso nochmal alles durch. Aber wenn Du die inhaltliche Änderungen machen könntest (die ja die eigentliche Arbeit sind), wäre das sehr schön. Mir fällt zum Reindenken leider die Zeit. Curtis Newton 18:49, 14. Feb. 2011 (CET) Trassiorf16:20, 1. Mär. 2011 (CET)Beantworten
Einführung in die homogenen Koordinaten: Den Sonderfall w=0 habe ich etwas überarbeitet. In der Abbildungsfunktion habe ich außerdem wieder die Koordinaten (X, Y, Z) statt (U, V, W, T) eingeführt. Das halte ich in diesem Fall für sinnvoll, da ja die kartesischen Koordinaten gegeben sind und man direkt sehen kann, wie man von diesen Koordinaten zu den Bildkoordinaten kommt. Andernfalls müßte man zusätzlich erklären, wie man die homogenen Koordinaten aus den kartesischen erhält. Außerdem war die Bezeichnung der Koordinaten verglichen mit dem zweidimensionelan Fall nicht glücklich, den im zweidimensionalen Fall ist w die zusätzliche Koordinate, im dreidimensionalen Fall entsprach W der Z-Koordinate. Die folgende Html-Syntax habe ich gemäß Hilfe:TeX wieder geändert. 93.195.179.24816:14, 4. Apr. 2011 (CEST)Beantworten
Beziehung zwischen korrespondierenden Punkten: Hier hast Du in der letzten Gleichung die Koordinaten x, y und 1 (teilweise) durch u, v und w ersetzt. Das ist ja prinzipiell richtig, paßt aber nicht zu der in Berechnung durchgeführten Ausmultiplikation. Um zu zeigen, daß die Epipolargleichung auch für die Bildkoordinaten x und y gilt, halte ich es hier ebenfalls für sinnvoll, diese Koordinaten in der Gleichung zu verwenden.
8-Punkt-Algorithmus: Der Einschub mit den falschen Korrespondenzen ist ja richtig. Meiner Meinung nach sollte das aber nicht in einem Atemzug mit den Meßungenauigkeiten genannt werden. Messungenauigkeiten bewirken (kleine) Abweichungen, und es kann eine Lösung durch Approximation gefunden werden. Falsche Korrespondenzen führen zu einer falschen Matrix und sind ganz anders zu behandeln.
Kameraposition in Automatische Berechnung: Ist es nicht besser, die ersten beiden Bilder zu vertauschen? Es es ja wichtig, daß es zwei Aufnahmestandorte gibt, was aus dem jetzigen Text auch nicht deutlich hervorgeht.
Sonderfall 1: Durch den Einschub über den Vorteil der homogenen Koordinaten ist der Bezug im nächsten Satz ("In diesem Fall ...") etwas weit von dem Beispiel der Kameras A und B entfernt. Kann man das woanders unterbringen? 93.195.152.10218:25, 4. Apr. 2011 (CEST)Beantworten
Letzter Kommentar: vor 13 Jahren5 Kommentare3 Personen sind an der Diskussion beteiligt
Der erklärende Zusatz des Wortes "Projektionszentrum" im Absatz "Prinzip" ist irreführend. Der Nebensatz "entspricht dem Objektiv der Kamera" suggestiert, dass es sich beim Projektionszentrum um das Objektiv handelt. Das ist falsch. Das für diesen Artikel relevante Projektionzentrum (also der Punkt auf den die aus der Szene ankommenden Strahlen zulaufen) ist der optische Mittelpunkt des Kamerasystems, also der Mittelpunkt der Eintrittspupille des Objektivs. Diese ist zwar (bei konstanter Brennweite) eine Eigenschaft des Objektivs, muss jedoch noch nicht einmal innerhalb des Objektivs liegen. Ein sinnvollerer Zusatz wäre also z.B. "entspricht dem Mittelpunkt der Eintrittspupille des Objektivs".
Nach Kraus gibt es zwei Ansätze, die zu unterschiedlichen Projektionszentren führen: Die Beschreibung der Strahlenoptik mit optischer Achse und zwei Hauptebenen. Hierbei bildet der Schnittpunkt der objektseitigen Hauptebene mit der optischen Achse das Projektionszentrum. In der Photogrammetrie wird ein Hauptstrahl definiert, der senkrecht auf der Bildebene steht. Die Mitte der Eintrittspupille bildet das objektseitige Projektionszentrum. Damit Eintrittswinkel = Austrittswinkel (bezogen auf den Hauptstrahl) gilt, wird ein bildseitiges mathematisches Projektionszentrum definiert und restliche Verzeichnungen durch Kalibrierung ermittelt. Obiger Vorschlag ist daher auch nicht ganz korrekt. Man könnte vielleicht allgemeiner schreiben "wird durch das Objektiv bestimmt" oder den Zusatz ganz streichen.
Letzter Kommentar: vor 12 Jahren3 Kommentare2 Personen sind an der Diskussion beteiligt
Da der Begriff der Pseudoinversen sicher vielen nicht so geläufig ist, gebe ich zu bedenken, ob man diesen Begriff hier nicht lieber vermeiden sollte.
Die Alternative: zerlegen in (hierbei ist die aus den ersten drei Spalten bestehende Teilmatrix von ) und die Geradengleichungen mit Hilfe von darstellen wie z.B. in [4], Formel (23). Man kommt dann mit der "gewöhnlichen" Inversen einer Matrix aus. -- Dhanyavaada13:58, 4. Sep. 2011 (CEST)Beantworten
Ausserdem ist der folgende Satz falsch: "Ein beliebiger Punkt auf dem Strahl lässt sich mit der Pseudoinversen berechnen:
. "
Der Begriff Pseudoinverse kommt nur einmal vor, und wird hier kurz als eine Möglichkeit (von mehreren) angegegeben, mit der sich ein beliebiger Punkt berechnen läßt, dessen Bild ist. Für das weitere Verständnis des Artikels muß man nur verstehen, daß es eine Matrix gibt, mit der man einen beliebigen Punkt auf dem Strahl berechnen kann, und daß die Pseudoinverse eine solche Matrix ist. Die Pseudoinverse ist eigentlich nur als ein Beispiel von vielen möglichen Matrizen genannt.
Ich bin mir nicht sicher, daß die oben vorgschlagene Aufteilung in eine quadratische Matrix und einen Vektor immer zum Ziel führt. Denn eine quadratische Matrix ist nicht automatisch invertierbar. Die Formeln wären dann aber unübersichtlicher.
Bei der Herleitung im Artikel muß "ein beliebiger Punkt" gefunden werden, der auf abgebildet wird. Es geht nicht darum, eine Formel für alle möglichen Punkte aufzustellen. Und das Gewünschte leistet die Pseudoinverse wie jede andere generalisierte Inverse. Als generalisierte Inverse von bezeichnet man eine Matrix , für die gilt. Sie ist nur bei regulären Matrizen eindeutig. Die Pseudoinverse ist eine spezielle, eindeutige generalisierte Inverse.
Ein Objektpunkt wird auf den Bildpunkt abgebildet. Wird mit einer beliebigen genralisierten Inversen ein beliebiger Punkt berechnet, so gilt für dessen Bild:
Der mit der generalisierten Inversen (oder speziell mit der Pseudoinversen) berechnete Punkt hat also das selbe Bild wie und liegt damit auf dem gesuchten Strahl. Genau das und nicht mehr ist im Artikel gesucht. Meiner Meinung nach lohnt es sich, sich näher mit der Pseudoinversen zu beschäftigen, statt sie zu umschreiben. Denn dadurch werden Formeln und Herleitung unübersichtlicher. 217.230.114.19318:13, 7. Dez. 2011 (CET)Beantworten
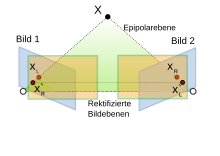
Normalbilderzeugung ist KEINE Rektifikation! Bitte korrigieren!
Letzter Kommentar: vor 5 Monaten8 Kommentare3 Personen sind an der Diskussion beteiligt
@Mollseifer Ich habe gerade deine Änderungen im Artikel gelesen. Was du hier beschreibst ist das Erstellen von Normalbildern. Das ist inhaltlich korrekt beschrieben. Aber es ist KEINE Rektifikation. Das ist der falsche Fachbegriff. Bitte korrigieren!
Zur Info: Bei der Rektifikation handelt es sich um eine Korrektur der perspektiven Abbildung, derart, dass die Blickrichtung der Kamera auf eine gedachte Objektebene exakt senkrecht wird. Dadurch werden Rechtecke, die aufgrund der perspektiven Verzerrung als allgemeines Viereck abgebildet werden, wieder zu einem Rechteck. Das Ergebnisbild ist also rektifiziert bzw. entzerrt und man hat einen einheitlichen Abbildungsmaßstab. Dies ermöglicht, dass man im rektifizierten Bild direkt messen kann. --OlafTheScientist (Diskussion) 12:26, 24. Jan. 2024 (CET)
Siehe auch Stereonormalfall.OlafTheScientist (Diskussion) 12:29, 24. Jan. 2024 (CET)Beantworten
@Olaf: Danke für den Hinweis. Ich habe den Stereonormalfall mit aufgenommen. In der Literatur findet man aber in etlichen Veröffentlichungen über Stereokamerasysteme auch den Begriff "Rektifikation/Rektifizierung" für die beschriebene Transformation. In der Photogrammetrie hat sich dagegen der Begriff Stereonormalfall geprägt. Ich habe es dementsprechend verallgemeinert. --Mollseifer (Diskussion) 17:40, 24. Jan. 2024 (CET)Beantworten
Tatsächlich wird in der englischen Literatur fast ausschließlich der Begriff "rectification" verwendet. Das war mir nicht bewußt. Ich habe daher mal nach dem Ursprung des Wortes gesucht "to rectify" und zu meiner Überraschung ist die Bedeutung: "etwas gerade machen". Ich dachte immer es würde buchstäblich bedeuten "etwas rechteckig machen". Da lag ich wohl falsch.
Mir war der englische Begriff "rectification" bisher nur bekannt als Übersetzung des deutschen Fachbegriffes Entzerrung. Zumindest wird es so in der Photogrammetrie genannt. Offenbar hat er im englischen Sprachraum jedoch mehrere Bedeutungen. Insofern fehlen mir jetzt die guten Argumente, warum man es in der deutschen Übersetzung nicht auch so nennen darf. Zumindest möchte ich mein Unbehagen darüber ausdrücken. Mir wäre es lieber, wenn man - zumindest auf Deutsch - von Erstellen (Berechnen) von Normalbildern spricht.Berechnen von Normalbildern von Kamerasystemen mit nichtparallenen optischen Achsen. Rot: Bildebenen der linken und rechten Kamera (Konvergenzfall). Grün: Bildebenen im Stereonormalfall.
Mir gefällt das Bild nicht so. Hätte man nicht dieses nehmen können und einfach ergänzen? Ist ein svg und lässt sich damit leicht bearbeiten. Würde dann besser in den Artikel passen. Curtis Newton↯12:12, 30. Jan. 2024 (CET)Beantworten
Auf diese Weise kann der Korrespondenzpartner xR im rechten Bild zum Bildpunkt xL in der gleichen Bildzeile gesucht werden, da die Epipolarlinien nach der Transformation stets kollinear ...
Der Begriff kollinear hat mich hier verwirrt, da ich ihn sofort mit dem Abbildungstrahl in Verbindung setze. Du meinst aber gar nicht den Abbildungstrahl, sondern die Epipolarlinien. Dort stimmt es zwar, aber evtl. kann man das anders formulieren?
![{\displaystyle \mathbf {l} =[\mathbf {e} _{2}]_{\times }\cdot \mathbf {H} \cdot \mathbf {x} _{1}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/069c2dd049860105ef6dc65124fa211d0019d064)























{kind=link}
{kind=link}