Armprothese
Als Armprothese bezeichnet man eine Prothese der oberen Extremitäten. Je nach Ansatzpunkt der vorangegangenen Amputation gibt es verschiedene Hauptgruppen dieser „Körperersatzstücke“, die wie Orthesen bei Bedarf angelegt werden können:
- Finger- und Handprothesen
- Unterarmprothesen
- Oberarmprothesen

oben: Habitusprothese aus Holz und Leder (1904)
unten: Bionische & Myo-Elektrische Prothese (2016)
Die Geschichte und Entwicklung der Armprothesen ist ein wichtiges Teilgebiet der Prothetik. Der Verlust eines, oder sogar beider Arme (und Hände) stellt den Betroffenen vor nur sehr schwer lösbare Probleme bei der Bewältigung seines Alltags. Neben der reinen funktionalen Beeinträchtigung spielte von Anfang an auch der optische, sprich ästhetische, Aspekt eine entscheidende Rolle, da das Fehlen einer Extremität (Früher mehr als Heute) als schwerer Makel und sogar als „Wertminderung“ des Betroffenen angesehen wurde.
In ihrer langen Geschichte hat sich die Armprothese vom einfachen Hilfsmittel zur Vertuschung einer Behinderung zu einem elektronikunterstützten, immer effizienteren Körperteil-Ersatz entwickelt. Trotzdem darf bei allen technischen Erfolgen – vor allem der letzten zwanzig Jahre – nicht vergessen werden, dass die Prothesen für die Hand bei weitem noch nicht so ausgefeilt sind, wie aktuelle Beinprothesen, bei denen es Varianten gibt, die sportliche Leistungen erlauben, die für Unversehrte nicht erreichbar sind.[1] Bisher ist es noch nicht gelungen, eine wirklich gleichwertige (oder sogar überlegene) Ersatzhand zu konstruieren, da kein anderes Teil des menschlichen Körpers so komplexe und virtuose Bewegungsabläufe wie eine gesunde Hand vollbringt.[2]
Grundsätzliche Unterteilung
Bearbeiten
Bezogen auf die jeweilige Ausführung und Funktion haben sich in der Orthopädietechnik folgende Bezeichnungen etabliert:
Habitusprothese (passive Prothese)
Diese Form wurde und wird hauptsächlich für den kosmetischen Ersatz gebaut, um den Verlust zu kaschieren. Früher meist mit einem Lederhandshuh als Überzug, heute mit Fingern aus Silikon. Eine Funktion ist in der Regel nicht vorgesehen.
Eigenkraftprothese
In diesen Typus wurden zum Teil verschiedene Operationstechniken mit in die Armprothesenversorgung integriert. Früher häufig hergestellt, wird diese Art der Prothese durch eine verbesserte Technik heute mehr und mehr durch Fremdkraftprothesen ersetzt. Bei Fingeramputationen ermöglichen spezielle Vorrichtungen das Greifen.
Bionische & Myo-Elektrische Prothese (Fremdkraftprothese)
in die Prothese werden verschiedene Handsysteme eingebaut, bei der mittels myoelektrischer Signale die Prothesenhand bewegt wird. Der Anwender steuert mittels eingeübter Muskelsignale die Bewegung, die teilweise durch Mikroprozessoren und Elektromotoren optimiert wird. Daher spricht man auch von einer Fremdkraftprothese. Die Entwicklung geht hin zum Bionischen Arm, der direkt aus dem Gehirn heraus gesteuert wird.
Eine gewisse Sonderstellung nimmt die Arbeitshand ein. Bei diesem Prothesentyp steht kompromisslos die Funktion im Vordergrund, und im Gegensatz zur Kunsthand wird bei der Arbeitshand keine Rücksicht auf den ästhetischen Aspekt der Prothese genommen.
Historischer Überblick
BearbeitenErste chirurgische Eingriffe, die man als Amputation bezeichnet kann, und die die Patienten überlebten, sind auf Grund von verheilten Knochenfunden aus der Altsteinzeit nachweisbar.[3][4] Ob, und ab Wann in dieser Epoche schon eine Art von Ersatzgliedmaßen existierten ist nicht belegt.
Bekannt als erster überlieferter Träger einer Handprothese, ist der römische Offizier und Politiker Marcus Sergius Silus im 2. Jahrhundert v. Chr.[5][6] Bei seinem zweiten Feldzug verlor er seine rechte Hand, woraufhin er sich eine eiserne Kunsthand (dextra ferrea) anfertigen ließ,[7] mit der er auch einen Schild habe halten können. Karl Sudhoff stellte deshalb die Hypothese auf, die Prothese könnte über einen beweglichen Fingerblock verfügt haben, ähnlich den frühen Eisernen Händen der Renaissance.[6] Da über ihre Konstruktion jedoch nichts bekannt ist, müssen alle Versuche einer Rekonstruktion spekulativ bleiben. Hand- beziehungsweise Armprothesen sind aus der Zeit der griechisch-römischen Antike ansonsten nicht überliefert, es gibt auch bis ins späte Mittelalter hinein keine archäologischen Hinweise.[8]
Für das ausgehende Mittelalter[9] und die frühe Neuzeit, also die Zeit zwischen 1500 bis 1800, ist das erste Auftauchen so genannter Eiserner Hände (teilweise auch Ritterhände) dokumentiert. Dabei handelt es sich um passive metallene Hand- und Armprothesen. Diese Kunsthände vereinigten kosmetische („Schmuckhand“) mit funktionellen Eigenschaften. Ihr bekanntester Vertreter ist die um 1530 entstandene, jüngere der beiden Eisernen Hände des Ritters Götz von Berlichingen.[10]
Die jüngere Götzhand inspirierte im 19. Jahrhundert die Konstrukteure Peter Ballif und Caroline Eichler bei der Entwicklung der ersten modernen Handprothesen. Eichlers künstliche Hand von 1836[11] war die erste brauchbare willkürlich, also ohne Unterstützung der gesunden Hand, bewegliche Prothese der oberen Extremität.[12]
In der Zeit vom amerikanischen Bürgerkrieg bis zum Ersten Weltkrieg wurde hauptsächlich an der Steigerung des Tragekomforts bei den bestehenden Typen gearbeitet.
1896 arbeitete der italienische Chirurg Giuliano Vanghetti an der Idee, Armamputierte mit einer, durch eigene Kraft beweglichen künstlichen Hand zu versorgen.[13] Die erste Beschreibung seiner Idee wurde 1898 veröffentlicht und Studien am Menschen begannen 1900.[14] 1915 begann der deutsche Chirurg Ferdinand Sauerbruch, auf Basis einer Idee des Maschinenbauprofessor Aurel Stodola, der vorschlug, die noch vorhandenen Muskeln im Stumpf als Antrieb für eine künstliche Hand zu nutzen, und einer groben Skizze für eine künstliche Hand, die sich so vom Träger bewusst öffnen und schließen lassen sollte, an der Umsetzung zu arbeiten.
Der Erste Weltkrieg mit seinem enormen Anfall von Versehrten mit verlorenen Gliedmaßen stellte die Medizin vor die grundlegende Herausforderung sinnvollen Ersatz zu schaffen. Bei den oberen Extremitäten bildeten sich zuerst zwei Hauptrichtungen heraus, die sich laut Weinert als Schmuckarme und Arbeitsarme bezeichnen lassen. Die reinen Schmuckarme – und Hände waren möglichst realistisch nachgebildete Imitate der realen Körperteile. Ihre Funktion war es, „in möglichst vollendeter Form den natürlichen Arm in Ruhelage und beim Gehen“ nachzuahmen. Mit derartigen Prothesen sollte die Behinderung im Alltag möglichst unsichtbar gemacht werden.[15] Den gegensätzlichen Weg ging man bei der Entwicklung der sogenannten Arbeitsprothesen, die genaugenommen nichts anderes waren, als an den Körper montierte Werkzeuge-Träger.[16]
Ab 1916 stand der sogenannte Sauerbruch-Arm zur Verfügung. Mit dieser „willkürlich bewegbaren künstlichen Hand“ (Zitat Sauerbruch) konnte vielen Schwerkriegsversehrte des Ersten Weltkriegs ein – zumindest einigermaßen – erträgliches Leben ermöglicht werden. Die Konstruktion wurde schrittweise verbessert und wurde auch nach dem Zweiten Weltkrieg bis in die 1950er Jahre zur Reha von Kriegsverletzten eingesetzt.[17][18]
In den 1960er Jahren wurden erste Versuche mit Myo-Elektrischen Prothesen durchgeführt. Der Grundgedanke dieser Technologie ist es, über Elektroden, die die Muskelaktivität am Stumpf erfassen, elektrische Motoren zu aktivieren, die Greif- und Umwendebewegungen der Hand und Funktionen des Ellenbogens steuern können.[19] Der erste kommerzielle myoelektrische Arm wurde 1964 vom Zentralen Prothesen Forschungsinstitut der UdSSR produziert.[20][21]
Der Aktuell (2024) letzte Stand der Technik ist die Entwicklung des Bionischen Arms. Das Ziel ist die direkt Ansteuerung der Prothese über das Gehirn (also ohne des Abfragen von Nervenimpulsen in der verbliebenen Muskulatur).
Ein großer Erfolg in diesem Bereich ist Schaffen eines „taktilen Rückempfinden“, also die Möglichkeit über Sensoren in der Prothese „spüren zu können“, ob ein Gegenstand hart oder weich ist.[22]
-
 Bild 1
Bild 1 -
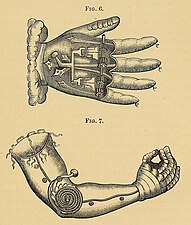 Bild 2
Bild 2 -
 Bild 3
Bild 3 -
 Bild 4
Bild 4 -
 Bild 5
Bild 5 -
 Bild 6
Bild 6 -
 Bild 7
Bild 7 -
 Bild 8
Bild 8




,_National_Museum_of_Health_and_Medicine_(4742790818).jpg)



- Bild 1: Die Eiserne Hand (Handprothese) des Götz von Berlichingen, entstanden um 1510, Stahlstich aus dem 19. Jahrhundert.
- Bild 2: Eiserne Hand und Arm, entworfen von dem Chirurgen Ambroise Paré, Ende des 16. Jahrhunderts.
- Bild 3: Kunsthand des preußischen Hofzahnarztes Peter Ballif (1775–1831), Trageweise mit Leibgurt.
- Bild 4: Erste brauchbare aktive (eigenkraftbetätigte) Kunsthand, konstruiert von Margarethe Caroline Eichler aus Berlin, patentiert in Preußen am 24. November 1836.
- Bild 5: Seltener Fall einer „Stütz-Prothese“: Die Hand blieb erhalten, der Oberarmknochen war zertrümmert und ist teilweise entfernt (1864)
- Bild 6: Die, heute nur noch bedingt gültigen, medizinischen Amputationsgrenzen des menschlichen Armes (1925) A: für Nichtprotesenträger, oder Träger von Arbeits-Armen. B: für Träger von kosmetischem Armersatz
- Bild 7: Stumpfvorbereitung für den sog. „Sauerbruch-Arm“ Illustration aus „Carl Franz (1870–1946) – Lehrbuch der Kriegschirurgie“
- Bild 8: Ein norwegischer Metallarbeiter (Schweißer) mit zwei Arbeitsprothesen, an denen verschiedenste Werkzeuge auf genormten Montageböcken angebracht werden konnten. (1955)
Technische Entwicklung
BearbeitenAlle Formen künstlicher oberer Extremitäten waren bis zum Aufkommen der sogenannten Eisernen Hände reine Imitationen ohne funktionellen Nutzen. Ab dieser Entwicklungsstufe konnten die Prothesen mittels beweglicher Teile in eine gewünschte Position gebracht werden. All diese Prothesen mussten mit der gesunden Hand (oder wenn diese nicht vorhanden – durch einen Dritten) in Stellung gebracht, und gegebenenfalls arretiert werden. Die Arretierung der Gelenke erfolgte über einen mehr oder weniger komplexen Verriegelungsmechanismus mit Sperrklinken und Blattfedern. Dieser Mechanismus, ähnelt einem Batterieschloss.[23]
Das älteste bekannte Exemplar dieser neuen Generation ist eine als Erste Hand aus Florenz[24] bezeichnete passive rechte Handprothese aus der zweiten Hälfte des 15. Jahrhunderts. Die Finger (bis auf den Daumen) sind zu einem im Grundgelenk beweglichen Block zusammengefasst. Sie können also nicht einzeln, sondern nur zusammen bewegt werden, während der Daumen unbeweglich ist.[25]
Zum Anfang des 16. Jahrhunderts[26] erschienen Eiserne Hände mit zwei unabhängig voneinander beweglichen Fingerblöcken (Beweglicher Daumen plus die vier restlichen Finger im Grundgelenk), wodurch sich die Griffsicherheit deutlich erhöhte.
Der nächste Schritt waren Prothesen mit beweglichen Daumen und vier einzeln im Grundgelenk beweglichen Fingern. Zu den bekanntesten Vertretern dieser Gattung zählt die Zweite Hand aus Florenz und die sogenannte Ingolstädter Hand im Bayerischen Armeemuseum, die auf 1520 datiert wird.[27]
Den Höhepunkt der Entwicklung in dieser Epoche stellen zweifelsohne die Balbronner Hand (die auf jeden Fall vor 1564 entstand) und die jüngere Götzhand (um das Jahr 1530)[28] dar. Hier sind die Finger in zwei beziehungsweise drei Gelenken artikulierbar. Das führt im Vergleich zu früheren Varianten zu einer wesentlich aufwendigeren Mechanik.
Das 1836, von der deutschen Bandagistin,[29] Feinmechanikerin („Instrumentenmacherin“) und Konstrukteurin[30] Caroline Eichler vorgestellte Modell, kann man als die erste wirklich „moderne Handprothese“ bezeichnen, da sie erstmals die bewusste („willkürliche“) Bewegung der Prothese ohne Unterstützung der gesunden Hand ermöglichte.[31] Dabei bediente sie sich eines um 1812 vom Berliner Zahnarzt Peter Ballif erfundenen Prinzips, bei dem die Handprothese durch die verbliebene Muskulatur im Oberarmstumpf mittels eines Zugmechanismus betätigt wurde. Ballifs Konstruktion war jedoch wenig ausgereift und nicht praxistauglich. Eichlers Entwurf war weiter entwickelt und unterschied sich in einigen wesentlichen Merkmalen: Die Finger wurden Hier aktiv geschlossen und durch Spiralfedern aus Neusilberdraht, je eine in jedem Fingergelenk, wieder gestreckt.[32][33] Zur Kraftübertragung dienten Darmsaiten von rund 1 mm Durchmesser.[34]
Bei Oberarmamputierten war die Versorgung mit funktionellen Prothesen aufgrund des oft nur sehr kurzen Amputationsstumpfes nicht einfach. Häufig konnte dabei nur eine aktive Bewegung realisiert werden, beispielsweise das Öffnen des Daumens, betätigt durch ein Seil an der gegenüberliegenden Schulter. Aber auch Rumpfbewegungen wurden für die Bewegungen der Prothesengelenke nutzbar gemacht.[35]
Eine weitere Verbesserung bei der Entwicklung der willkürlich bewegbaren künstliche Hand stellte der Sauerbruch-Arm dar: jetzt mussten die Finger nicht mehr durch Federn geöffnet werden, sondern auch diese Bewegung konnte aktiv durch Muskeln gesteuert werden. Diese Prothese wurde auf den verbleibenden Oberarm angepasst. Zu kurze Stümpfe, oder mit weit ausgedehnter narbiger Veränderung der Muskulatur eigneten sich nicht.[36] Vor Verwendung der Sauerbruch-Prothese war ein intensives, vorbereitendes Training der Muskulatur notwendig, da Beuge- und Streckmuskulatur synergistisch arbeiten. Der Hauptanteil dabei fällt immer dem Bizeps „Beuger“ zu. Der Chirurg Wilhelm Anschütz lehrte dazu, dass eine künstliche Muskeldissoziation vorgenommen werden kann, in der ein Muskel durch stetiges Training zu einer anderen als der ursprünglichen Funktion „erzogen“ werden kann.[36]
Die Übertragung der Oberarm-Muskelkraft auf die künstliche Greifhand erfolgte durch in den Muskel eingefügte Elfenbeinstifte, die über Zugschnüre (bzw. einen Metallstab)[37] die Zangenbewegung der Finger ausführten. Die Stifte lagen in Hautkanälen, die quer zur Kontraktionsrichtung entweder durch den in natürlicher Lage belassenen oder zu einem sogenannten „Kraftwulst“ künstlich umgebildeten Muskel gingen.[36]
Für das gute Funktionieren des Sauerbruch-Arm war das Element der Greifhand von großer Bedeutung: der Uhrmacher und Feinmechaniker Jacob Hüfner ließ sich 1922 eine künstliche Hand mit einem speziellen Sperrmechanismus patentieren. Dadurch war es möglich die Hand nicht nur weit zu öffnen und zum Zangengriff zu schließen, sondern auch durch einen kleinen Hebel in jeder beliebigen Stellung „einzufrieren“, so dass es möglich war, mit der Hand lange und kraftvoll zuzupacken und gleichzeitig die Muskulatur zu entlasten.[37] Die mechanische Kraftentwicklung die mit der Prothese beim Greifen möglich war, lag bei 30–60 kgcm[38] (entspricht 2,94 bis 5,88 Newtonmeter).
Diese sogenannten Eigenkraftprothesen wurden in der Folgezeit hauptsächlich in der Materialqualität und dem Tragekomfort optimiert. So wurde das Holz vom Fiberglas abgelöst, auf das immer leichtere – stabilere – Kunststoffe folgten, bis hin zu den Carbon-Prothesen. Die Polsterungen und Befestigungen zum Tragen der Prothesen erlebten ebenfalls eine stetige Weiterentwicklung.
Die Fremdkraftprothese, auch Myo-Elektrische Prothese genannt, war ein weiterer Entwicklungsschritt. Diese durch Muskelkontraktion in Bewegung gesetzte, batteriebetriebene Prothese wird über das mit Oberflächenelektroden abgeleitete Elektromyogramm (EMG) gesteuert. Die erfassten Signale werden gleichgerichtet und in Steuersignale für die Motoren der Prothese gewandelt. Dabei wird die Proportionalität zwischen Muskelkraft und erfassbarem Myogramm ausgenutzt. Die Muskelkraft steigt weitestgehend proportional mit der Anzahl der aktivierten Muskelfasern. Die Effektivität der myoelektrischen Prothese wird jedoch durch die sequentielle Ansteuerung, die Anzahl der verfügbaren Steuersignale und die nach der Amputation verbliebenen Fähigkeiten, unterschiedliche Muskelgruppen gezielt und unabhängig voneinander anzuspannen, beeinflusst.[39] Diese ist auf der Hautoberfläche des Menschen mittels empfindlicher Elektroden messbar und zur Steuerung der Prothese nutzbar.
Für die neueste Generation der Fremdkraftprothesen, die Bionischen Prothesen gibt es noch keinen Standard für das Design. Jedes Forschungslabor oder Unternehmen arbeitet individuell und innovativ. Bei der Erprobung der Modelle stehen die Wissenschaftler immer wieder vor großen Herausforderungen, wie dem hohen Gewicht, der ungenügende Leistungsfähigkeit der Batterien, oder dem apprupten, unharmonischen Ablauf bestimmter Bewegungen. Große Fortschritte erwartet man sich gegenwärtig vom verstärkten Einsatz künstlicher Intelligenz.
Vielversprechende Resultate bringt auch die sogenannte „Fluidhand“, die an der Uni Karlsruhe entwickelt wurde. Dank einer hydraulischen Steuerung kann bei dieser Prothese jeder Finger einzeln bewegt werden. So sind mit der Fluidhand immerhin schon fünf verschiedene Griffe möglich. Nach wie vor die größte Herausforderung für die Prothesenentwickler ist der Ersatz einzelner Finger.[40]
-
 Bild 1
Bild 1 -
 Bild 2
Bild 2 -
 Bild 3
Bild 3 -
 Bild 4
Bild 4 -
 Bild 5
Bild 5 -
 Bild 6
Bild 6 -
 Bild 7
Bild 7





_(18492491235).jpg)

- Bild 1: Die „Zweite Hand aus Florenz“, in geöffneter und geschlossener Position (15./16. Jh.)
- Bild 2: Handprothese, 1799; Die Finger können durch einen Vierkantschlüssel gekrümmt oder gestreckt werden;
- Bild 3: Eiserne Handprothese, ursprünglich waren sechs Schnallen vorhanden (zur Befestigung um die Schulter des Trägers und zum Zusammenhalten der Schiene) vermutlich Ende des 16. Jahrhunderts, Anfang des 17. Jahrhunderts.
- Bild 4: linke Armprothese, einzeln (in allen Gelenken) justierbare Finger und mechanisches Ellbogengelenk; aus der Sammlung von Henry Welcome (19 Jhr.)
- Bild 5: Rohling einer, im Sauerbruch-Arm verwendeten Hüfnerhand mit den, für den Zangengriff wichtigen, beweglichen Fingern und dem Arretierungshebel (ca. 1916)
- Bild 6: durch 3D-Druck hergestellte Kunsthand mit voll beweglichen Fingern, sie werden normalerweise für Kinder verwendet, die ohne Finger geboren werden (2015)
- Bild 7: Der Bionische Arm – eine gehirngesteuerte Armprothese mit taktilen Sensoren (2011)
Literatur
Bearbeiten- Ruhr-Universität Bochum: Die Geschichte der Armprothese unter besonderer Berücksichtigung der Leistung von Ferdinand Sauerbruch (1875–1951)
- SRF.ch: Schritt für Schritt: Die Geschichte der Prothese
- Neue Zürcher Zeitung: Die Geschichte der Prothesen
- researchgate.net: Prothesenversorgung im Ersten Weltkrieg
Weblinks
Bearbeiten- Die willkürlich bewegbare künstliche Hand. (1937). Ausschnitt aus dem unter Sauerbruchs Regie für die Reichsstelle für den Unterrichtsfilm hergestellten Hochschulfilm
- SWR Wissen: Intelligente Prothese durch KI. Auf YouTube (deutsch)
Einzelnachweise
Bearbeiten- ↑ Susanne Kuttner: Besser als das Original. WirtschaftsWoche, 11. März 2015.
- ↑ WDR: Prothesen. 24. Januar 2020, abgerufen am 24. September 2024.
- ↑ Manfred Reitz: Steinzeitchirurgie. In: Pharmazeutische Industrie. Band 73, Nr. 10, 2011, S. 1755–1757.
- ↑ Tim Ryan Maloney et al.: Surgical amputation of a limb 31,000 years ago in Borneo. In: Nature. Band 609, 2022, S. 547–551, doi:10.1038/s41586-022-05160-8. Erfolgreiche Amputation vor 31.000 Jahren. Auf: wissenschaft.de vom 7. September 2022.
- ↑ Karl Sudhoff: Die eiserne Hand des Marcus Sergius aus dem Ende des 3. Jahrhunderts vor Christo. In: Mitteilungen zur Geschichte der Medizin und der Naturwissenschaften. Nr. 15, 1916, S. 1–5.
- ↑ a b Liebhard Löffler: Der Ersatz für die obere Extremität. S. 8 f.
- ↑ Liebhard Löffler: Der Ersatz für die obere Extremität. S. 8 f.
- ↑ W. von Brunn: Der Stelzfuß von Capua und die antiken Prothesen. In: Karl Sudhoff (Hrsg.): Archiv für Geschichte der Medizin. Bd. 18, Nr. 4, Steiner, 1926, S. 351–360 (JSTOR:20773385).
- ↑ Wiebke Ada de Boer: Klinisches Bild erworbener Amputationen im Kindesalter – retrospektive Analyse von 124 Patienten aus der Klinik und Poliklinik für technische Orthopadie und Rehabilitation in Münster von 1986 – 2003. Münster 2008, S. 2f. (Digitalisat).
- ↑ Günter Quasigroch: Die Handprothesen des fränkischen Reichsritters Götz von Berlichingen. 2. Fortsetzung: Die Zweithand. In: Waffen- und Kostümkunde. Bd. 25, 1983, S. 103–120.
- ↑ Hermann Fritze: Arthroplastik.
- ↑ Maritta Adam-Tkalec: Vier Frauen, viermal Fortschritt – ein unfeministischer Beitrag zum Frauentag. In: Berliner Zeitung. 8. März 2023, abgerufen am 12. Januar 2024.
- ↑ Nicolai Guleke: Kriegschirurgie und Kriegschirurgen im Wandel der Zeiten. Vortrag gehalten am 19. Juni 1944 vor den Studierenden der Medizin an der Universität Jena. Gustav Fischer, Jena 1945, S. 40.
- ↑ Peppino Tropea, Alberto Mazzoni, Silvestro Micera, Massimo Corbo: Giuliano Vanghetti and the innovation of "cineplastic operations". In: Neurology. Band 89, Nr. 15, 10. Oktober 2017, ISSN 1526-632X, S. 1627–1632, doi:10.1212/WNL.0000000000004488, PMID 28993523, PMC 5634664 (freier Volltext) – (nih.gov [abgerufen am 22. September 2024]).
- ↑ Sebastian Weinert: „Schmuckarme“ und „Ersatzglieder“: Prothetik im Ersten Weltkrieg. In: mittendrin. 7. Mai 2019, abgerufen am 23. September 2024 (deutsch).
- ↑ Simon Bihr: „Entkrüppelung der Krüppel“. In: NTM Zeitschrift für Geschichte der Wissenschaften, Technik und Medizin. Band 21, Nr. 2, 1. Juni 2013, ISSN 1420-9144, S. 107–141, doi:10.1007/s00048-013-0092-2 (springer.com [abgerufen am 23. September 2024]).
- ↑ Stadtarchiv München: Jubiläumsoperation. Landeshauptstadt München, 2015, abgerufen am 14. Januar 2020.
- ↑ Der Chirurg Prof. Dr. med. Max Lebsche (1886–1957). Leben und Werk. Dissertation.
- ↑ Myoelektrische Prothesen: Uniklinik Mannheim. Abgerufen am 24. September 2024.
- ↑ E. David Sherman: A Russian Bioeleciric-Controlled Prosthesis: Report of a Research Team from the Rehabilitation Institute of Montreal. In: Canadian Medical Association Journal. Band 91, Nr. 24, 1964, S. 1268–1270, PMID 14226106, PMC 1927453 (freier Volltext).
- ↑ Ashok Muzumdar: Powered Upper Limb Prostheses: Control, Implementation and Clinical Application. Springer, 2004, ISBN 978-3-540-40406-4.
- ↑ Medizinischen Universität Wien: Durchbruch bei bionischen Prothesen: Wiederherstellung des Gefühls bei künstlichen Extremitäten möglich | MedUni Wien. Abgerufen am 24. September 2024.
- ↑ Günter Quasigroch: Die Handprothesen des fränkischen Reichsritters Götz von Berlichingen. 1. Fortsetzung: Die Ersthand. In: Waffen- und Kostümkunde. Bd. 24, 1982, S. 17–33.
- ↑ Liebhard Löffler: Der Ersatz für die obere Extremität. S. 10 f.
- ↑ Vittorio Putti: Historical Prostheses. S. 317 f.
- ↑ Wiebke Ada de Boer: Klinisches Bild erworbener Amputationen im Kindesalter – retrospektive Analyse von 124 Patienten aus der Klinik und Poliklinik für technische Orthopadie und Rehabilitation in Münster von 1986 – 2003. Münster 2008, S. 2f. (Digitalisat).
- ↑ Tobias Schönauer: Objekt: Prothese Hand ausführlich. Abgerufen am 23. September 2024 (deutsch).
- ↑ Günter Quasigroch: Die Handprothesen des fränkischen Reichsritters Götz von Berlichingen. 2. Fortsetzung: Die Zweithand.
- ↑ Doris Schwarzmann-Schafhauser: Orthopädie im Wandel: die Herausbildung von Disziplin und Berufsstand in Bund und Kaiserreich (1815–1914). (= Sudhoffs Archiv. Heft 53.) Franz Steiner Verlag, Stuttgart 2004, ISBN 3-515-08500-9, S. 39.
- ↑ Martin Friedrich Karpa: Die Geschichte der Armprothese unter besonderer Berücksichtigung der Leistung von Ferdinand Sauerbruch (1875–1951). (= Dissertation, Universität Bochum). Bochum 2004, S. 23; Digitalisat ( des vom 19. Februar 2013 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis. (PDF).
- ↑ Maritta Adam-Tkalec: Vier Frauen, viermal Fortschritt – ein unfeministischer Beitrag zum Frauentag. In: Berliner Zeitung. 8. März 2023, abgerufen am 12. Januar 2024.
- ↑ Wiebke Ada de Boer: Klinisches Bild erworbener Amputationen im Kindesalter – retrospektive Analyse von 124 Patienten aus der Klinik und Poliklinik für technische Orthopadie und Rehabilitation in Münster von 1986–2003. (= Dissertation Universität Münster). Münster 2008, S. 3; Digitalisat (PDF; 4,1 MB).
- ↑ Hermann Fritze: Arthroplastik.
- ↑ Hermann Fritze: Arthroplastik. S. 33; vgl. Violinensaiten auf damianstrings.com
- ↑ https://www.researchgate.net/publication/251420413_Prothesenversorgung_im_ersten_Weltkrieg
- ↑ a b c Carl Franz (1870–1946) – Lehrbuch der Kriegschirurgie. Verlag von Julius Springer, Berlin. (2. Aufl. 1936) Seite 223
- ↑ a b Deutsches Medizinhistorisches Museum, die Sauerbruch-Prothese. Abgerufen am 22. September 2024
- ↑ Carl Franz (1870–1946) – Lehrbuch der Kriegschirurgie. Verlag von Julius Springer, Berlin. (2. Aufl. 1936) Seite 224
- ↑ Nach dem Vorbild der Natur. (PDF; 381 kB) In: Ärzteblatt. Abgerufen am 24. Juli 2011.
- ↑ https://www.aerztezeitung.de/Medizin/Neue-Prothesen-die-Haenden-schon-sehr-aehnlich-sind-352924.html