Untermannigfaltigkeit

In der Differentialgeometrie beziehungsweise Differentialtopologie ist eine Untermannigfaltigkeit eine Teilmenge einer Mannigfaltigkeit, die mit den Karten der Mannigfaltigkeit verträglich ist.
Definition Bearbeiten
Eine Teilmenge einer -dimensionalen Mannigfaltigkeit ist genau dann eine -dimensionale (eingebettete) Untermannigfaltigkeit, wenn für jeden Punkt eine Karte von mit existiert, so dass die Gleichung








erfüllt ist. Jede (eingebettete) Untermannigfaltigkeit ist mit den gerade angegebenen Karten und der induzierten Unterraumtopologie wieder eine Mannigfaltigkeit.
Es gibt auch eine allgemeinere Definition von immersierten Untermannigfaltigkeiten, diese sind definiert als das Bild einer injektiven Immersion einer Mannigfaltigkeit. Wenn ohne weiteren Zusatz von Untermannigfaltigkeiten gesprochen wird, sind jedoch in aller Regel eingebettete Untermannigfaltigkeiten gemeint.
Orientierbarkeit und Orientierung Bearbeiten
Eine Untermannigfaltigkeit heißt orientierbar, wenn es einen zugehörigen orientierten Atlas gibt. Dies liegt genau dann vor, wenn alle Karten gleichorientiert sind.
Damit stellt die Gleichorientiertheit von Atlanten eine Äquivalenzrelation dar und wir bezeichnen die Äquivalenzklasse als die Orientierung von M. Man kann beide als ein Paar zusammenfassen.


Beispiele Bearbeiten
Standardbeispiele für Untermannigfaltigkeiten sind die offenen Mengen des (gleichdimensional) oder der Äquator einer Sphäre (niederdimensional). Allgemein ist das Urbild eines regulären Wertes einer Funktion eine Untermannigfaltigkeit von , siehe Satz vom regulären Wert.

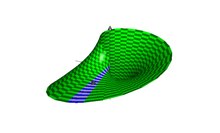
Ein weiteres Beispiel ist das Möbiusband. Es lässt sich darüber hinaus zeigen, dass es nicht orientierbar ist. Der Standardbeweis dafür sieht vor, einen Normaleneinheitsvektor auf der Oberfläche entlang laufen zu lassen. Die resultierende Abbildung ist nicht stetig und somit ist das Möbiusband nicht orientierbar.
Alternativ kann man zeigen, dass es keinen orientierten Atlas gibt. Dazu bietet es sich an, zunächst einen Atlas zu suchen und zu zeigen, dass dieser nicht orientiert ist. Es könnte jedoch ein weiterer Atlas existieren, welcher orientiert sein könnte. Dann müsste je eine Karte aus zu je einer Karte aus entweder gleichorientiert oder entgegengesetzt orientiert sein. Dies ist jedoch nicht möglich, weil es Karten gibt, die abschnittsweise gleich und abschnittweise entgegengesetzt sein müssen.


Literatur Bearbeiten
- Klaus Jänich: Vektoranalysis. 2. Auflage. Springer-Verlag, Berlin u. a. 1993, ISBN 3-540-57142-6.
- R. Abraham, J. E. Marsden, T. Ratiu: Manifolds, Tensor Analysis, and Applications (= Applied Mathematical Sciences 75). 2nd Edition. Springer-Verlag, New York NY u. a. 1988, ISBN 0-387-96790-7.
- O. Forster: Analysis III, Aufbaukurs Mathematik. Vieweg+Teubner Verlag Springer Fachmedien Wiesbaden 2012